Skip to main content
More about HKUST
University News
Academic Departments A-Z
Life@HKUST
Library
Map & Directions
Jobs@HKUST
Faculty Profiles
About HKUST
Follow us on
Facebook
Instagram
LinkedIn
YouTube
WeChat
Information for
Prospective Students
Current Students
Alumni
Faculty & Staff
Media
A
A
A
Academics
Undergraduate Study
Research Postgraduate Study
Taught Postgraduate Study
Academy for Continuing Education
Faculty & Research
Overview
Our Faculty
Faculty Recruitment
Strategic Research Areas
Research Infrastructure
News & media
Highlights
Events
Press Releases
News Coverage
Photos
Videos
Publications
About SENG
At a Glance
HKUST Engineering
Mission & Vision
Milestones
Meet the Dean
Leadership
Our People
Departments & Centers
Industry Engagement
Entrepreneurship
Facts & Figures
Rankings
Awards
Jobs@HKUST
Contact Us
Search
Follow us on
Facebook
Instagram
LinkedIn
YouTube
WeChat
Search
Menu
Academics
Undergraduate Study
Research Postgraduate Study
Taught Postgraduate Study
Academy for Continuing Education
Faculty & Research
Overview
Our Faculty
Faculty Recruitment
Strategic Research Areas
Research Infrastructure
News & media
Highlights
Events
Press Releases
News Coverage
Photos
Videos
Publications
About SENG
At a Glance
HKUST Engineering
Mission & Vision
Milestones
Meet the Dean
Leadership
Our People
Departments & Centers
Industry Engagement
Entrepreneurship
Facts & Figures
Rankings
Awards
Jobs@HKUST
Contact Us
Information for
Prospective Students
Current Students
Alumni
Faculty & Staff
Media
Search
Breadcrumb
Home
News
Control and Robotic Systems
Control and Robotic Systems
Year
2024
2023
2022
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
News Category
Alumni Connection
Announcement
Entrepreneurship
Faculty & Student Story
Greater Bay
Insight Exchange
Outreach & Community
Partnership
Recognition
Research & Innovation
Robotics
STEAM Education
Sustainability
Teaching & Learning
Women in Engineering
Year
2024
2023
2022
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
News Category
Alumni Connection
Announcement
Entrepreneurship
Faculty & Student Story
Greater Bay
Insight Exchange
Outreach & Community
Partnership
Recognition
Research & Innovation
Robotics
STEAM Education
Sustainability
Teaching & Learning
Women in Engineering
Former Dean Named President-Elect of IEEE Communications Society
05/08/2016
Alumni Series: Women in Engineering – meet Claudia Sin
29/07/2016
SENG Achieved Outstanding Results in HKUST One Million Dollar Entrepreneurship Competition
21/07/2016
Prof Tim Tse Received Junior Award of International Association for Wind Engineering
Prof Tim Tse Received Junior Award of International Association for Wind Engineering
28/06/2016
Over 330 Alumni Celebrated HKUST’s 25th Anniversary on SENG Alumni Fun Day
Over 330 Alumni Celebrated HKUST’s 25th Anniversary on SENG Alumni Fun Day
15/06/2016
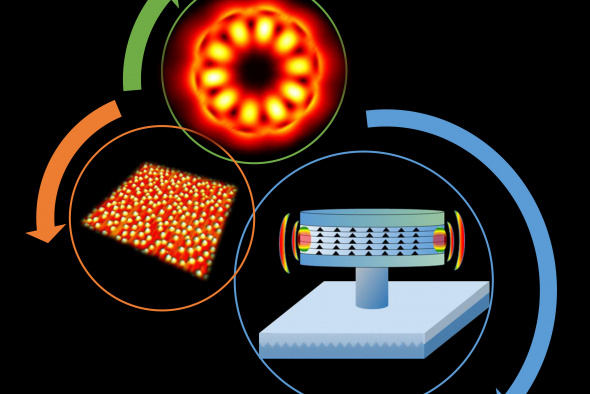
Breakthrough by Prof Kei May Lau and Collaborators to Make Microprocessors Faster and Less Power-Hungry
10/06/2016
Prof Patrick Yue Received Guanghua Engineering Science and Technology Prize Presented by Chinese Academy of Engineering
08/06/2016
Prof Xiangtong Qi Received Natural Science Award
03/06/2016
(From left) Dr Eden Woon, HKUST Vice-President for Institutional Advancement, Mr Ringo Yu, Managing Director of Fraser Construction Company and Prof Charles Ng, Associate Vice-President (Research and Graduate Studies)
HKUST Leads Research Project to Mitigate the Risks and Damage of Landslides in Hong Kong
24/05/2016
Undergraduate Student Received ASME Arthur L Williston Medal
20/05/2016
Pagination
Page
54
Page
55
Page
56
Page
57
Current page
58
Page
59
Page
60
Page
61
Page
62
Footer Secondary Menu
Departments
Chemical & Biological Engineering
Civil & Environmental Engineering
Computer Science & Engineering
Electronic & Computer Engineering
Industrial Engineering & Decision Analytics
Mechanical & Aerospace Engineering
Information for
Prospective Students
Current Students
Alumni
Faculty & Staff
Media
Resources
Faculty Profiles
Multimedia
Jobs @ HKUST
Library
A - Z Directory
School of Engineering Units
University Admin Offices
Contact Us
Contacts
SENG NEWS
To keep abreast of our latest news and updates
Subscribe







 Dr Eden Woon, HKUST Vice-President for Institutional Advancement, Mr Ringo Yu, Managing Director of Fraser Construction Company and Prof Charles Ng, Associate Vice-President (Research and Graduate Studies)")
{kind=link}