{kind=link}
科大工学院团队研发基於液态金属的电子逻辑元件 成功模仿捕蝇草的智能捕食机制

由香港科技大学(科大)工学院领导的一支研究团队,研发了一种基於液态金属的仿捕蝇草智能捕食机制的电子逻辑元件。该元件本身具有记忆和计算能力,无需其它辅助电子器件即可如捕蝇草般智能地回应各种刺激序列。这项研究探讨的智能策略及逻辑机制为理解自然界中的「智能」带来崭新视角,也对「具身智能」的发展提供了启发。
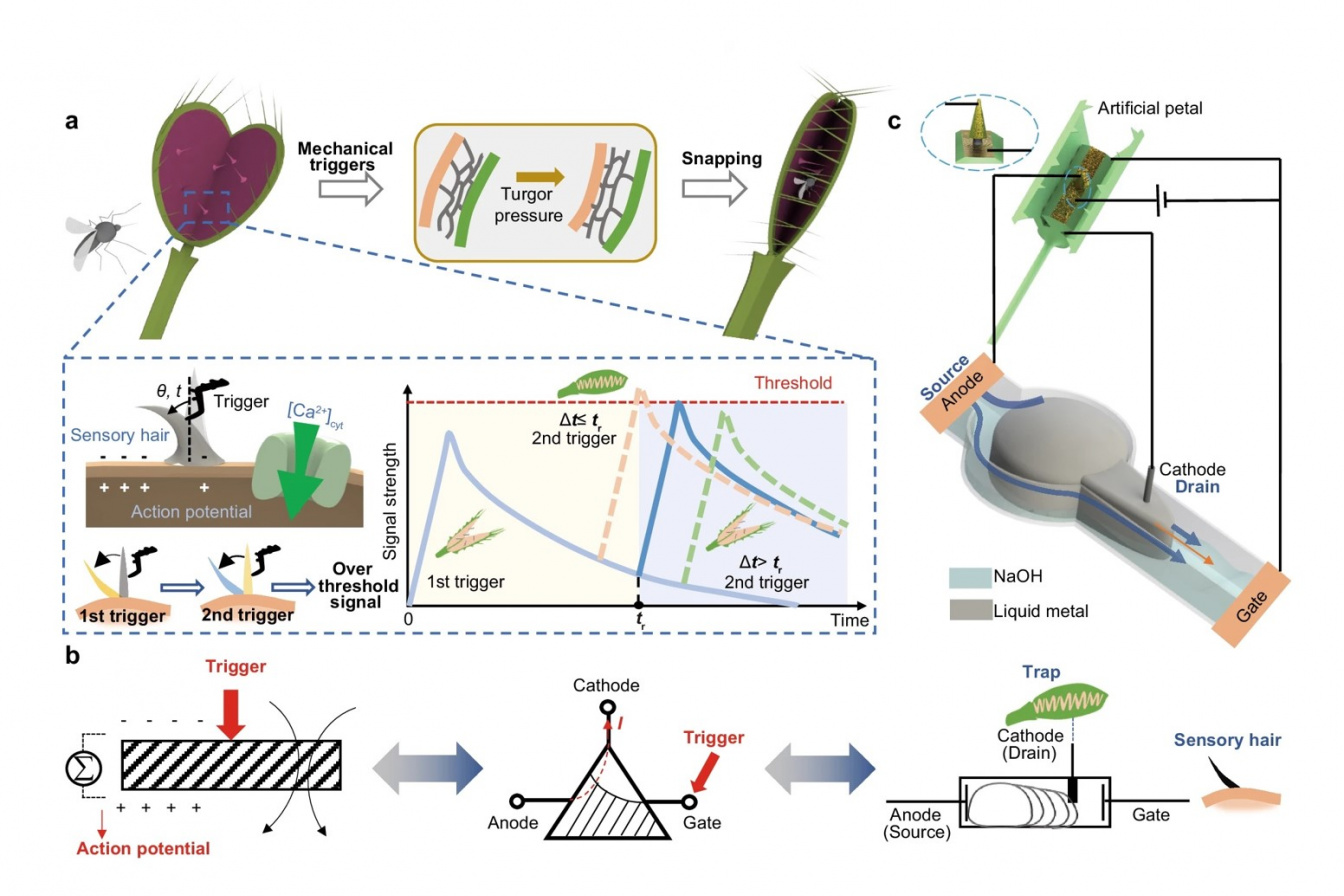
捕蝇草的独特捕食机制向来是生物智能领域的一个研究焦点。这个机制令捕蝇草能有效区分各种外部刺激,如单次丶双次刺激,进而区分如雨滴等的环境干扰(单次刺激)及昆虫(双次刺激),以确保成功捕获猎物。此项功能主要是由於捕蝇草的触毛具有类似记忆和计算的特徵,让它可以感知刺激和产生动作电位(细胞因受刺激而产生的电信号改变),并在短时间内记着刺激。
由科大电子及计算机工程学系副教授申亚京领导,以及其毕业於香港城市大学的前博士学生杨媛媛博士(现为厦门大学副教授)共同组成的研究团队,以捕蝇草内部电信号累积/衰减模型为基础,提出了一种基於液态金属丝延伸/缩短形变的液态金属逻辑模组(简称LLM)及元件。该元件以氢氧化钠溶液中的液态金属丝为导电介质,基於电化学及电毛细效应控制液态金属丝的长度,进而依据阳极和门极所施加的电刺激调控阴极输出。研究结果显示,LLM本身可以记忆电刺激的持续时间和间距,计算多次刺激累积的信号,并表现出类似捕蝇草的超卓逻辑功能。
为展示他们的研究,申教授及杨博士搭建了一套LLM智能决策器件丶仿触毛机械开关丶仿叶片柔性电驱动器的人工捕蝇草系统,成功复制并实现了捕蝇草的捕食过程。此外,他们还展示了LLM在功能电路集成丶滤波丶人工神经等方面的应用前景。这项研究不仅为模拟植物的智能行为提供了见解,也为後续的生物信号模拟器件及具身智能系统研发提供了可靠的参考。
申教授表示:「当提到『人工智能』,一般人想到的都是模拟动物神经系统的智能。然而,在自然界中,很多植物也可以通过特定的材料丶结构组合,展示出一定智能。这个研究方向有助我们理解自然界的『智能』,并为构建『类生命智能』提供新的视角和思路。」
他续称:「大约几年前,杨博士还在攻读博士课程时,我们一起探讨了仿照植物构建智能体这个想法。很高兴经过几年的努力,我们实现了对捕蝇草智能的概念验证和模拟。但值得提出的是,这项研究仍属一个比较初步的探讨,後期还有很多工作需要进一步开展,如设计更高效的结构丶减小器件的体积丶提升系统的反应灵敏度等。」
这项由申教授及杨博士合作的研究最近在全球顶尖的多元学科期刊《自然-通讯》上发表。
传媒查询:
李美珊
电话:2358 8982 / 电邮:celialee@ust.hk
叶嘉琪
电话:2358 5917 / 电邮:egkkyip@ust.hk
(原文於2024年6月6日在EurekAlert刊登。)